|
Wirepas SDK
|
|
Wirepas SDK
|
The Wirepas Mesh stack and the application can communicate via a Single-MCU API. The application is designed to have a single-entry point. This entry point is called by the Wirepas Mesh stack at boot. The application must do its initialization during the application entry point call.
Also, during the application entry point call, the Wirepas Mesh stack provides a list of services to the application. These services are implemented as a list of C callback functions. Most importantly, these services includes opening libraries (used by API_Open() function).
This page contains following sections:
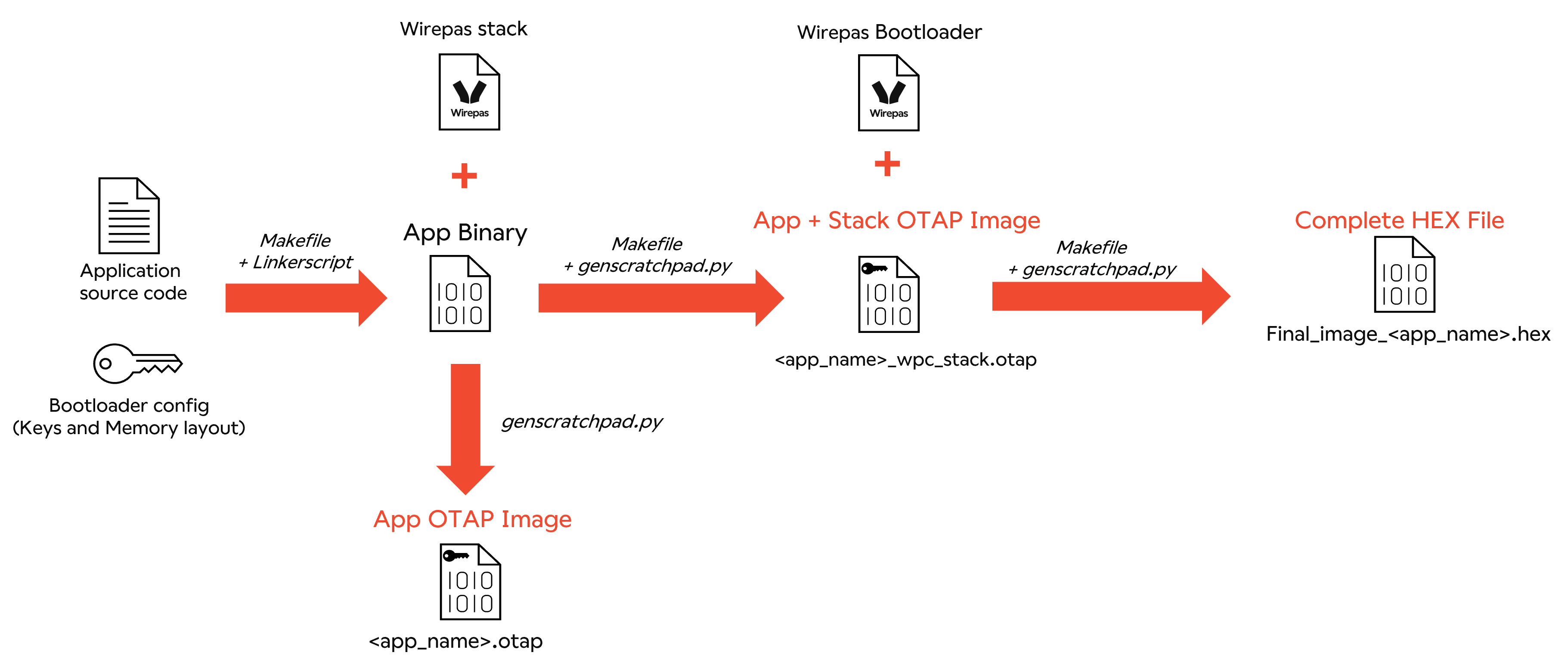
The build can be divided in three steps:
The application entry point and different callback functions are visualized in following picture:
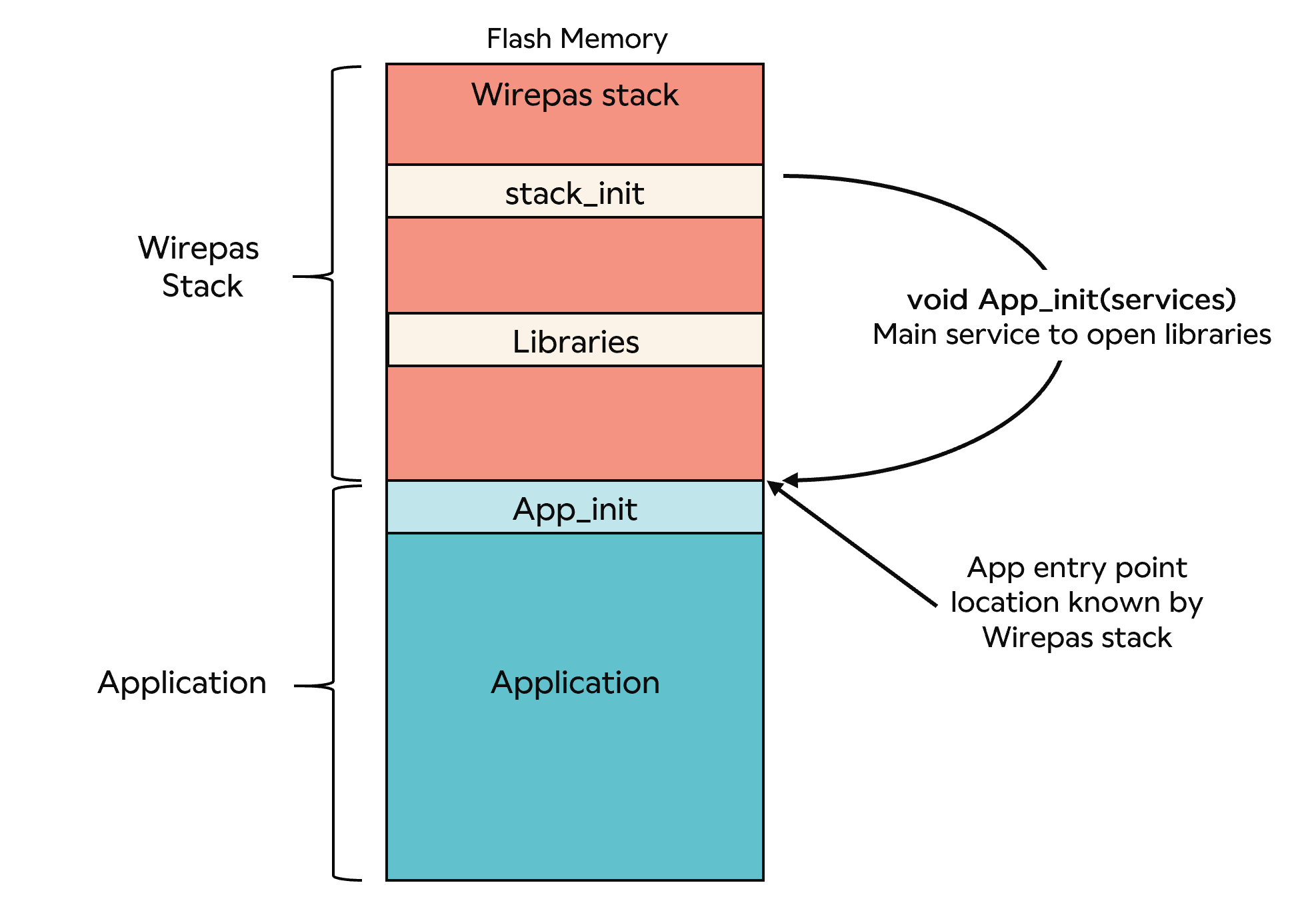
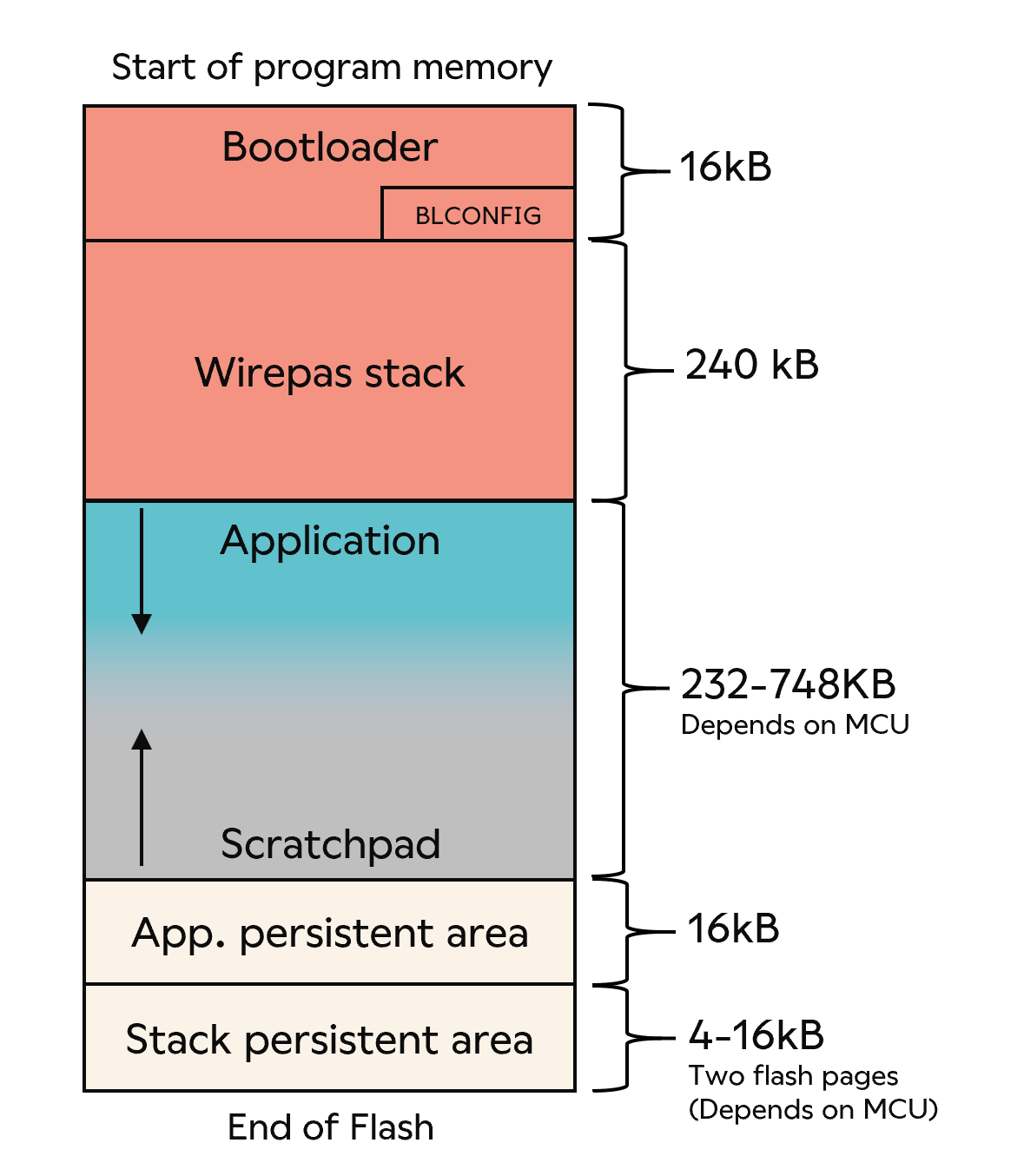
The flash memory partitioning includes the following regions:
Dedicated areas in flash and in RAM are reserved for the application. Size for these areas are platform dependent and described in SDKEnvironment". The C stack is shared between the application and the Wirepas Mesh stack. The application entry point must be allocated at the start of the application dedicated flash area. This is mandatory for the Wirepas Mesh stack to be able to know the application entry point location at run time.
Device requires application to be working properly. Without application, the stack itself is not started and radio communication is thus disabled. Wirepas Mesh stack checks the presence of the application at run time. The detection depends of the value of the first two bytes of the application dedicated flash area. If it is equal to 0xFFFF (default value), the Wirepas Mesh stack detects that there is no application and execution ends there. Otherwise, Wirepas Mesh stack calls the application entry point at this address. It is up to the customer to have positioned the function entry point here with the correct prototype. All the code needed to correctly position the right function at the right position is provided in the SDK.
Wirepas Mesh stack is a real-time system and is based on a cooperative scheduler. Tasks are scheduled based on their priorities and their execution times. To operate correctly, all the deadlines must be respected and each task must complete within the duration reported to the scheduler.
If a task asks the scheduler to execute for a given period, it must finish its work in the corresponding allocated window. Being late can affect the whole system performance and may result in incorrect operation . The scheduler cannot pre-empt a task. Thus, special care must be taken to guarantee that a task finishes on time.
Moreover as it is a cooperative scheduler, application must not ask to be scheduled all the time. It would prevent Wirepas tasks with a lower priority from getting access to the MCU. It may result with stack not being able to generate diagnostics or process OTAP commands. Even if their is no exact figure, Application must ensure a fair access to the MCU ressource.
An application task can get run-time in basically three different ways:
This page contains following sections:
The application can register one of its callback functions to be called at a given time and for a given period. At the end of its execution, the callback function returns the delay to be scheduled again. This mode allows the application to do periodical jobs, such as reading and sending a sensor value.
It must be noted, that the periodic application callback function is not necessarily called exactly at the requested time. The application task has lower priority than the Wirepas Mesh stack tasks. Thus, the application execution can be delayed to execute Wirepas Mesh stack tasks.
The application latency (delay between the requested start time and the real start time) depends on the execution duration specified during the callback function registration. The shorter the duration, the easier it is for the scheduler to find a time slot for the task. It is important to correctly size this time. It must be big enough to ensure that the callback function meets its deadline but small enough to reduce the latency.
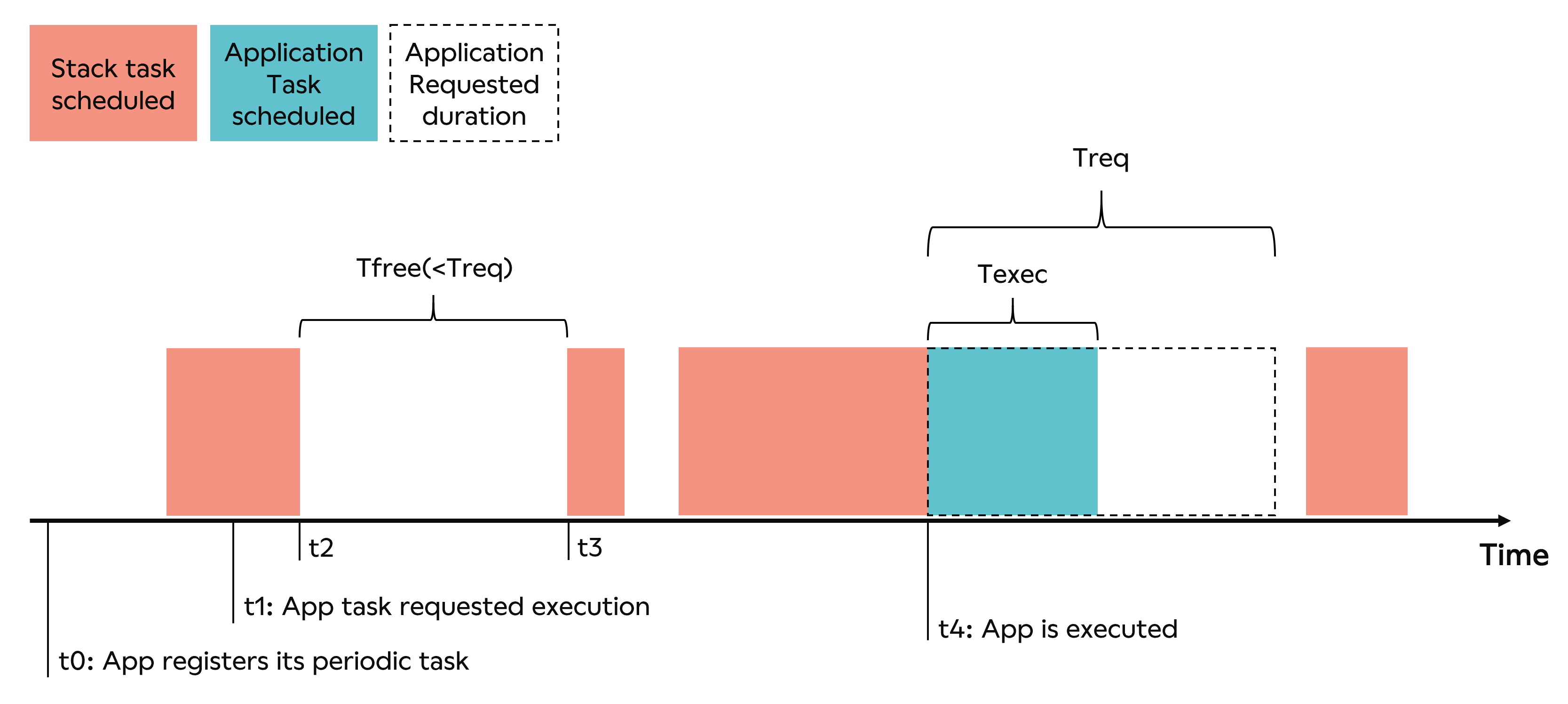
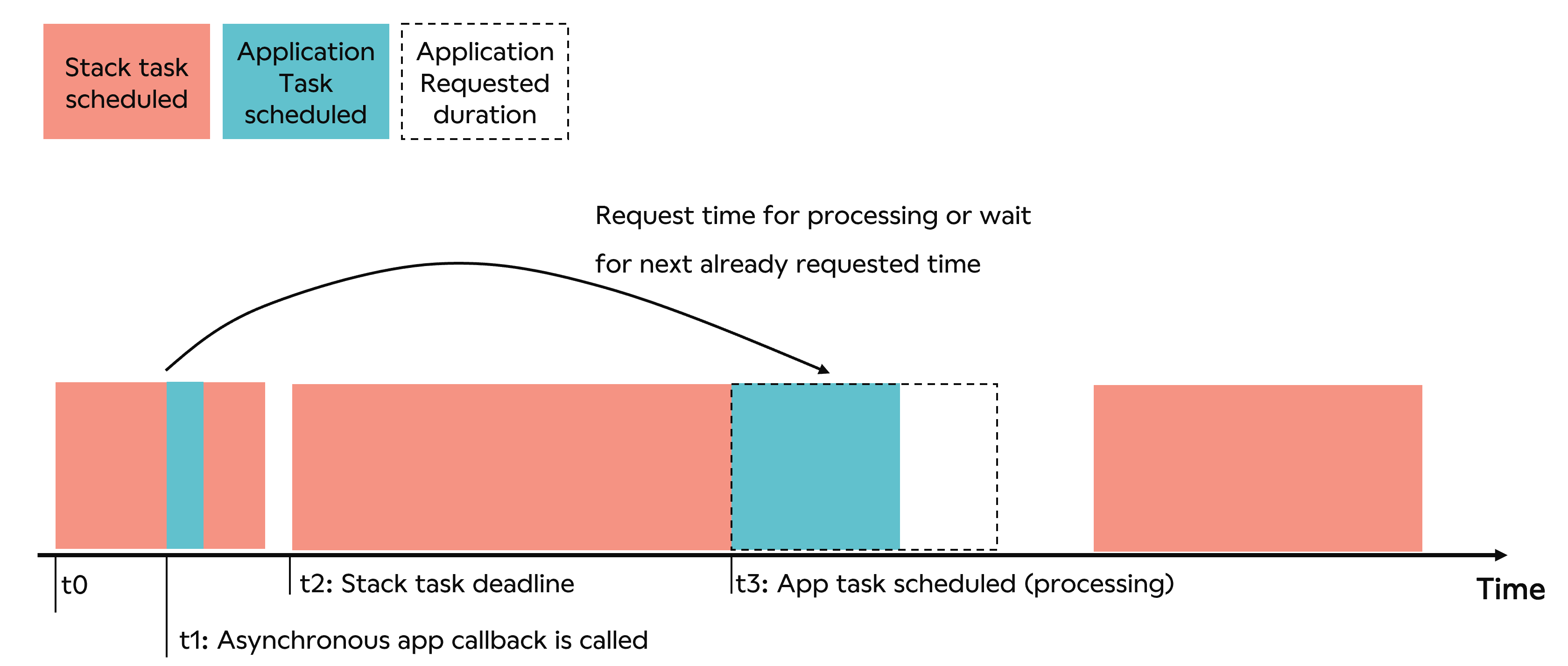
Figure below illustrates an example of scheduling the application task. Application registers its periodic task (callback) at time t0. Time t1 is the requested execution time of the application task. At time t2 there is a first free timeslot to run the task, but it cannot be run because the requested duration (Treq) is longer than the free time (Tfree = t3-t2). At time t4 there is enough time to run the application and the task is scheduled. The requested time includes a lot of margin (Texec < Treq) and the application task finishes before its deadline. With a more accurate sizing (Texec vs. Treq) the application task could have also been scheduled earlier at time t2.
Check out service for lib_system->setPeriodicCb() and app scheduler library or more information on how this is done with API services.
The application can also be executed asynchronously if the Wirepas Mesh stack has something to communicate to it, e.g. a message received from the network. This is done via callback functions the application provides to Wirepas Mesh stack at initialization.
These callback functions are called during a Wirepas Mesh stack task execution. Thus, the execution delay for these callback functions must be kept as short as possible. The application must avoid doing long processing or long operation (accessing a device for example). The recommended implementation is to save a state to be processed later. A good practice is to handle the data processing in the next periodically scheduled work (periodic application callback function). The schedule of the periodic work can also be updated to an earlier time if needed, but only one periodic work can be registered at a time. If no work is scheduled yet, it can be registered during the callback function. For recommended maximum periods, check guidance onmaximum execution time limits".
An example of processing an asynchronous callback function is presented in Figure below. At t1, the Wirepas Mesh stack calls one of the asynchronous application callback functions. The application handles it in a very short period and schedules a work to do the processing at t3.
There are plenty of various asynchronous callbacks served by the system. Depending on the callback, there may be tighter time limits, especially if the callback is called from the IRQ context. Most common callback used and example of such callback is unicast data reception callback.
The application can register to hardware interrupts. It must provide its own interrupt handler table (same format as the platform one) to Wirepas Mesh stack.
Application interrupts can then be enabled/disabled with a specific API services lib_system->enableAppIrq service and lib_system->disableAppIrq service.
There are two kinds of interrupts. Deferred interrupt and fast interrupt.
This page contains following sections:
The interrupts are handled in two levels: Wirepas Mesh stack implements the first-level interrupt handler which handles minimal needed operations (fast) in the interrupt context, and the application implements the second-level interrupt handler which is scheduled when there is enough free time.
Like in the periodic work, the application has a maximum duration time for its interrupt handler. As the latency to handle the interrupt at application-level is directly linked to the execution time of the application interrupt handler, the maximum execution time is set to 100us, see also guidance on maximumexecution time limits".
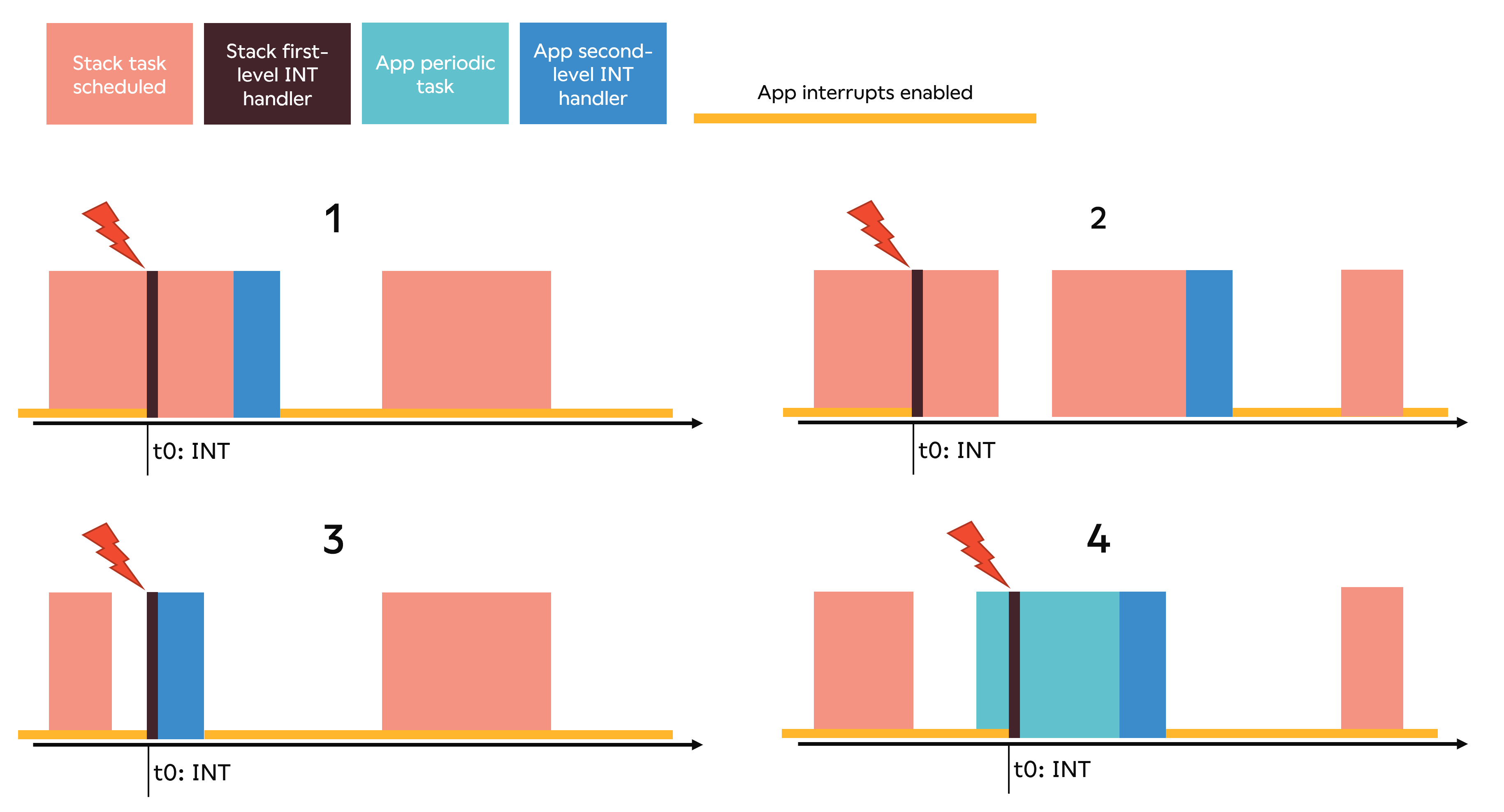
Below, there are 4 different scenarios for interrupts described:
In scenario 1, an interrupt fires whilst the Wirepas Mesh stack executes one of its tasks. The first Wirepas Mesh stack first level interrupt handler is call immediately and the interrupt line is disabled. The app second-level interrupt handler is scheduled to be executed as soon as possible. In this scenario, the Wirepas Mesh stack has enough free time before its next task, it can schedule the application interrupt handler. The interrupt line is enabled again.
In scenario 2, the application interrupt handler cannot be scheduled between the two Wirepas Mesh stack task because there is not enough time.
In scenario 3, the interrupt fires during an idle state. The interrupt wakes up the platform and is handled by the Wirepas Mesh stack and the application without any additional scheduling latency.
In scenario 4, the interrupt fires during the execution of an application periodic work. The first level interrupt handling happens during the application periodic task but the application handler is only executed at the end of the task. The application cannot be pre-empted by its own application interrupt handlers. This simplifies the design of the application regarding data protection.
The interrupts are handled directly by the application. So it can preempt the stack execution. For this reason, the handling must be short (few micro seconds) to avoid breaking the stack internal scheduling. See also guidance on maximum execution time limits.
Fast interrupts can also preempt application task, so concurrent data access can happen and protection mechanism must be implemented. Services in the API are available for that purpose: lib_system->enterCriticalSection() and lib_system->exitCriticalSection().
Fast interrupt must be used only when latency to serve the interrupt is crucial. For example, in case of a UART driver with a small FIFO hardware depth, fast interrupt must be used to avoid losing bytes. In this situation, the UART IRQ handler will just flush the byte from the hardware FIFO and store it in a software one to keep the handler execution short. No data processing must be done in the handler. Handling must be deferred to a periodic work.
But in many other situations, deferred interrupts can be used instead as it is easier to implement. In fact, as the handler is executed in a deferred task, execution time is less critical (it is currently limited to 100 micro seconds). As handler is executed as a task, it cannot preempt the app periodic task so no data protection mechanism is needed.
In the following table, the various types of methods on how application requests run-time and their maximum execution time are summarized:
| Execution type | Maximum execution time |
|---|---|
| Periodic application callback function | Application may request execution time and is safe to spend execution up to that time (max time is set to 100 ms) |
| Asynchronous callback functions | Generally 1 ms, (callback from thread context). Some callbacks (mentioned explicitly) are called from IRQ context and have maximum execution time of 50 us. |
| Deferred interrupt | 1 ms |
| Fast interrupt | 50 us |